Happy New Year Chris,
Set the offset pot such that when you command DAC0=0 on the Console Screen (with all axes disabled) that you have no motor torque.
I'm not sure what type of amplifier you have. The gain pot may be for the tach feedback input or for the command signal input. But regardless start with the minimum setting and only increase it if after the system is working you can't get enough speed or acceleration with the software settings.
Without any feedback to the amplifier the amplifier will be operating in torque (acceleration) mode rather than velocity mode. Acceleration mode is a more difficult type of system to stabilize because it is a naturally unstable system. This is because if you only use P gain which reduces the command (acceleration) to zero as the target position approaches the system will overshoot, whereas only using P gain on a velocity system will reduce the velocity to zero as you approach the target and there will be little or no overshoot. So expect to need some D gain to add some damping to get the system stable (or a pole-zero type of filter can be used).
First verify that the encoder is working by rotating the shaft manually. Then check if the amplifier is working by commanding torque using DAC console commands (the axis must be disabled or any DAC command will be immediately overwritten by the servo).
Then start with the KanalogInitialPID.mot and try adding D gain and increasing P gain to get a stable system. Unlike P and I gains, D gain tends to slow the system response by adding damping (opposes velocity toward the target) and make the system more stable. But only up to a point, as too much D gain will cause the velocity feedback to become unstable.
Regards
TK
| Group: DynoMotion |
Message: 837 |
From: Tom Kerekes |
Date: 1/2/2011 |
| Subject: Re: Tuning advice please |
yes, but it shouldn't be absolutely necessary.
TK
| Group: DynoMotion |
Message: 838 |
From: dunncl66 |
Date: 1/2/2011 |
| Subject: Re: Tuning advice please |
Where do I find KanalogInitialPID.mot ?
Chris
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Happy New Year Chris,
>
> Set the offset pot such that when you command DAC0=0 on the Console Screen (with
> all axes disabled) that you have no motor torque.
>
> I'm not sure what type of amplifier you have. The gain pot may be for the tach
> feedback input or for the command signal input. But regardless start with the
> minimum setting and only increase it if after the system is working you can't
> get enough speed or acceleration with the software settings.
>
> Without any feedback to the amplifier the amplifier will be operating in torque
> (acceleration) mode rather than velocity mode. Acceleration mode is a more
> difficult type of system to stabilize because it is a naturally unstable
> system. This is because if you only use P gain which reduces the command
> (acceleration)Â to zero as the target position approaches the system will
> overshoot, whereas only using P gain on a velocity system will reduce the
> velocity to zero as you approach the target and there will be little or no
> overshoot. So expect to need some D gain to add some damping to get the system
> stable (or a pole-zero type of filter can be used).
>
> First verify that the encoder is working by rotating the shaft manually. Then
> check if the amplifier is working by commanding torque using DAC console
> commands (the axis must be disabled or any DAC command will be immediately
> overwritten by the servo).
>
> Then start with the KanalogInitialPID.mot and try adding D gain and increasing P
> gain to get a stable system. Unlike P and I gains, D gain tends to slow the
> system response by adding damping (opposes velocity toward the target) and make
> the system more stable. But only up to a point, as too much D gain will cause
> the velocity feedback to become unstable.
>
> Regards
> TK
>
>
>
> ________________________________
> From: dunncl66 <dunncl66@...>
> To: DynoMotion@yahoogroups.com
> Sent: Sat, January 1, 2011 3:43:59 PM
> Subject: [DynoMotion] Tuning advice please
>
> Â
> Happy New Year Tom,
> I am trying turn an axis and having some trouble. I have one axis of a small
> mill wired up with a KFlop/KAnalog signaling +/- 10 vdc to an Advanced Motion
> Controls amp. The amp has some tuning pots on it as well. I have no feed back
> going to the amp, the encoders go to the KAnalog. How do you recommend tuning
> the system? Where should I set the gain and offset pots on the amp? Any advise
> on the soft PID numbers?
>
> Thanks in advance,
> Chris
> |
|
| Group: DynoMotion |
Message: 839 |
From: dunncl66@yahoo.com |
Date: 1/2/2011 |
| Subject: Re: Tuning advice please |
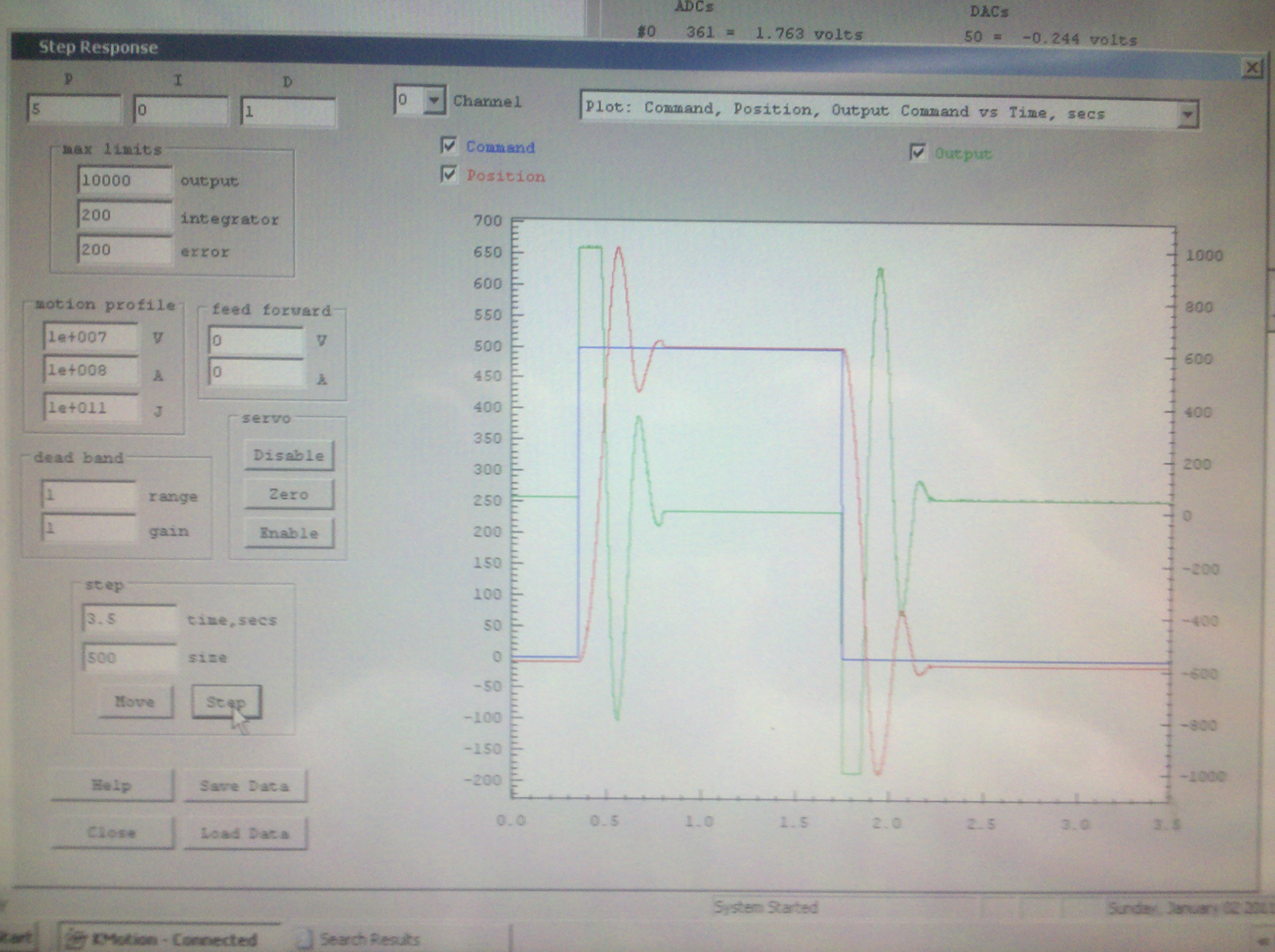
This is starting to behave a little. Can you tell what I should try next to tune it in better?
Thanks for all the help.
Chris -----Original message----- From: Tom Kerekes <tk@...>
To: DynoMotion@yahoogroups.com
Sent: Sun, Jan 2, 2011 18:52:27 GMT+00:00
Subject: Re: [DynoMotion] Tuning advice please
yes, but it shouldn't be absolutely necessary.
TK
| Group: DynoMotion |
Message: 843 |
From: Tom Kerekes |
Date: 1/3/2011 |
| Subject: Re: Tuning advice please [1 Attachment] |
Hi Chris,
Try reducing the Velocity, Acel, and Jerk to something more reasonable and use the "move" button instead of the step. Maybe Vel=300000, Accel=3e6, Jerk=3e7.
Use the Print-Screen button to capture a screen shot, then paste it to the Paint Program and save as a .png file will be much smaller.
You will probably need less P gain and more D gain.
Regards
TK
| |
| | | |
{kind=link}